关于runc创建容器的大致进程,网络上有很多介绍得文章有提及,主要分为container start和container init两个重要的部分,本文主要是就container init部分对应源码做介绍,以便对细节有深入的理解。
cgo初始化进程运行环境
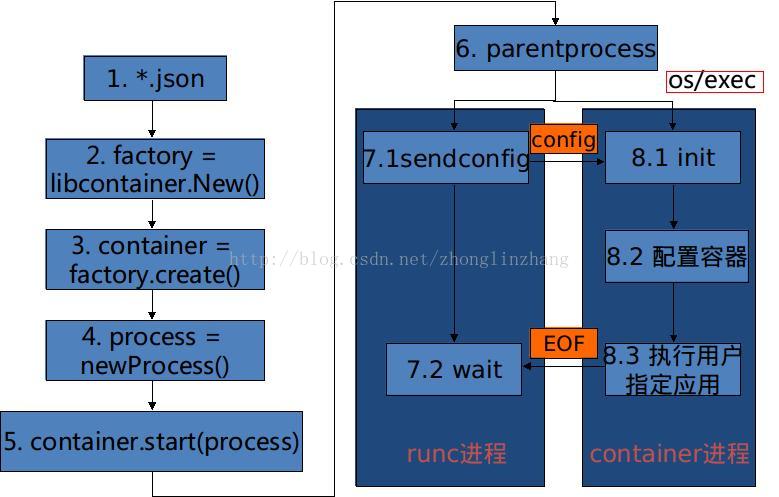
首先借用网上的图片介绍了container初始化时的进程关系:
在真正启动parentProcess的时候,这个bootstrapdata会通过socketpair的父socket端发送给init进程https://github.com/opencontainers/runc/blob/v1.0.0-rc8/libcontainer/process_linux.go#L298
那么这个结构体里包含哪些内容呢,这些内容init进程又是如何使用最终构建出容器进程的基础运行环境的呢?
首先我们需要知道这个bootstrapdata在哪里被使用。如其他博客介绍,该Init进程实际就是调用runc init。如果只是看其中init涉及的代码,你会发现根本找不到处理的逻辑。
这是因为go runtime是多线程的,多线程进程不能通过setns来设置user namespace,所以必须要引用libcontainer的nsenter包使用cgo来设置namepace,引用地址:https://github.com/opencontainers/runc/blob/v1.0.0-rc8/init.go#L8 cgo部分的主要逻辑在nsexec方法里,该方法的源代码位于https://github.com/opencontainers/runc/blob/v1.0.0-rc8/libcontainer/nsenter/nsexec.c#L540 也正是这里对bootstrapdata进行处理,处理的流程大致如下:
- 从环境变量中获取到上文中提供socketpair的child的文件句柄号。
/*
* If we don't have an init pipe, just return to the go routine.
* We'll only get an init pipe for start or exec.
*/
pipenum = initpipe();
if (pipenum == -1)
return;
- 将bootstrapdata解析成nlconfig_t结构体
/* Parse all of the netlink configuration. */
nl_parse(pipenum, &config);
- 刷新out of memory 的人工评分值
/* Set oom_score_adj. This has to be done before !dumpable because
* /proc/self/oom_score_adj is not writeable unless you're an privileged
* user (if !dumpable is set). All children inherit their parent's
* oom_score_adj value on fork(2) so this will always be propagated
* properly.
*/
update_oom_score_adj(config.oom_score_adj, config.oom_score_adj_len);
- 初始化两个socketpair用于与该进程的子进程以及孙进程进行通信
/* Pipe so we can tell the child when we've finished setting up. */
if (socketpair(AF_LOCAL, SOCK_STREAM, 0, sync_child_pipe) < 0)
bail("failed to setup sync pipe between parent and child");
/*
* We need a new socketpair to sync with grandchild so we don't have
* race condition with child.
*/
if (socketpair(AF_LOCAL, SOCK_STREAM, 0, sync_grandchild_pipe) < 0)
bail("failed to setup sync pipe between parent and grandchild");
- 使用setjmp, longjmp机制进行各项初始化。
其中第四、五步是整个过程的关键,这里一共进行了两次clone,共有parent进程,child进程(从parent clone而来),init进程(实际是从child clone而来),每个进程的执行逻辑分别在对应switch case的三个case分支,关系如下:
switch (setjmp(env)) {
case JUMP_PARENT: { //parent进程
...
child = clone_parent(&env, JUMP_CHILD);//复制生成child进程,执行逻辑跳转到JUMP_CHILD分支
...
}
case JUMP_CHILD: {//child进程
...
child = clone_parent(&env, JUMP_INIT);//复制生成init进程,执行逻辑跳转到JUMP_INIT分支
...
}
case JUMP_INIT: {//init进程
...
}
三个进程间,parent与child使用sync_child_pipe socketpair进行通信,parent与init使用sync_grandchild_pipe socketpair进行通信。child与init间没有通信。
parent进行:
- clone生成child进程
/* Start the process of getting a container. */
child = clone_parent(&env, JUMP_CHILD);
if (child < 0)
bail("unable to fork: child_func");
- 进入while循环处于与child间通信,直到child进行返回ready信号, 处理逻辑如下:
while (!ready) {
switch (s) {
case SYNC_ERR:{
//接收到来自child的error信息,抛出错误
}
case SYNC_USERMAP_PLS:{
//接收到child设置user map请求,设置uidmap gidmap.
//并向child发送完成ACK
}
case SYNC_RECVPID_PLS:{
//接收到child返回的PID信息,解析出PID
//并向child发送接收成功ACK
}
case SYNC_CHILD_READY:{
//接收到child返回的ready信号
//向child发送接收成功ACK
//向create进程child PID以及init PID
//kill child进程
//退出while循环
}
}
- 进入循环,处理与init进程交互,直到接收到ready信号
while (!ready) {
//向init进程发送SYNC_GRANDCHILD信号
switch (s) {
case SYNC_ERR:{
//接收到来自child的error信息,抛出错误
}
case SYNC_CHILD_READY:{
//退出while循环
}
}
Child进程:
- 设置namespaces
if (config.namespaces)
join_namespaces(config.namespaces);
- unshare user
if (unshare(CLONE_NEWUSER) < 0)
bail("failed to unshare user namespace");
- 向parent发送SYNC_USERMAP_PLS
s = SYNC_USERMAP_PLS;
if (write(syncfd, &s, sizeof(s)) != sizeof(s))
bail("failed to sync with parent: write(SYNC_USERMAP_PLS) to sync with parent: write(SYNC_USERMAP_PLS)");
- set resource uid & ushare cgroup
- clone 生成init进程
child = clone_parent(&env, JUMP_INIT);
- 向parent进程发送PID
s = SYNC_RECVPID_PLS;
if (write(syncfd, &s, sizeof(s)) != sizeof(s)) {
kill(child, SIGKILL);
bail("failed to sync with parent: write(SYNC_RECVPID_PLS)");
}
if (write(syncfd, &child, sizeof(child)) != sizeof(child)) {
kill(child, SIGKILL);
bail("failed to sync with parent: write(childpid)");
}
- 向parent 发送ready信号后退出
s = SYNC_CHILD_READY;
if (write(syncfd, &s, sizeof(s)) != sizeof(s)) {
kill(child, SIGKILL);
bail("failed to sync with parent: write(SYNC_CHILD_READY)");
}
exit(0);
Init进程:
- 等待parent进程的SYNC_GRANDCHILD信号
if (read(syncfd, &s, sizeof(s)) != sizeof(s))
bail("failed to sync with parent: read(SYNC_GRANDCHILD) to sync with
parent: read(SYNC_GRANDCHILD) to sync with parent: read(SYNC_GRANDCHILD)
to sync with parent: read(SYNC_GRANDCHILD)");
if (s != SYNC_GRANDCHILD)
bail("failed to sync with parent: SYNC_GRANDCHILD: got %u", s);
- 设置sid uid gid
- 向parent发送ready信号
- 释放config空间
从上面可以看出,经过一系列的处理后,最后init进程将会一直运行下去去执行go runtime相关的runc init逻辑,而在这个过程中,namespace相关的设置已经完成,进程已经完成了与宿主的资源隔离。